Browse categories
Explore
Fiverr Pro
English
$
USD

Engineer
Skills
See my services
Robotics Kinematics
Jordan Digitals • Freelance
Aug 2025 - Dec 2025 • 4 mos
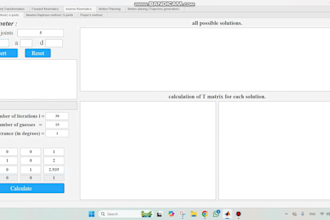
MATLAB-based GUI for robotic inverse kinematics and motion planning analysis. The interface integrates symbolic and numerical computation for solving forward and inverse kinematics using DH parameter modeling and Jacobian-based methods. It allows definition of multi-DOF robot structures, input of joint variables, computation of end-effector position and orientation, and evaluation of kinematic consistency. The GUI supports trajectory generation using polynomial motion profiles and provides visualization of joint space and task space results. It is designed for analyzing robotic manipulators in simulation environments with structured user input and automated computation of kinematic solutions.
